Animations 102 – changing direction
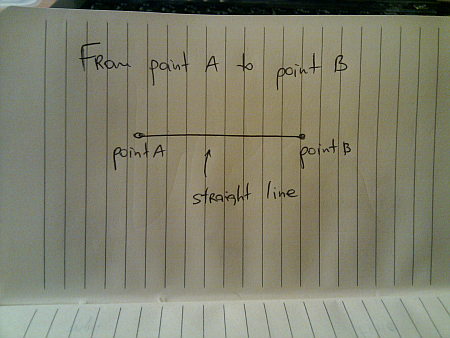
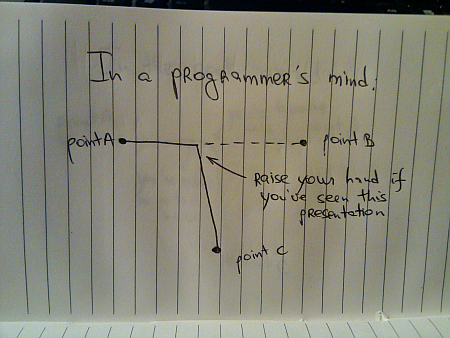
The examples in the previous entry talked about moving from point A to point B in a straight line:
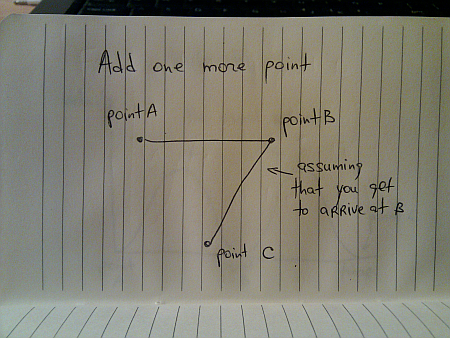
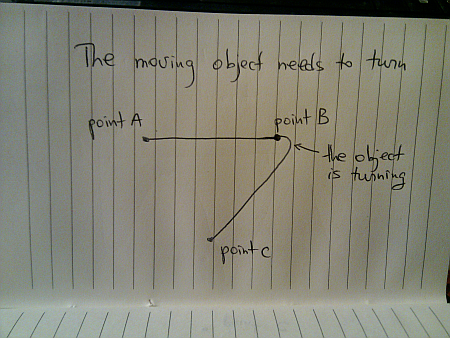
Now let’s add one more point – after arriving at point B you are asked to head to point C:
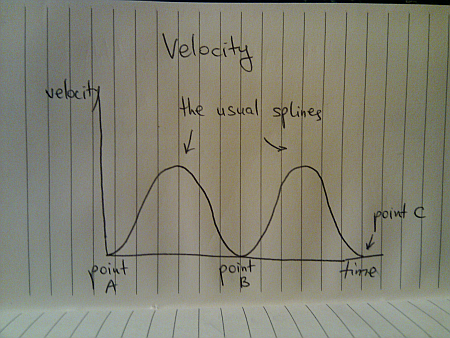
Assuming the prevalent usage of splines to approximate the acceleration and deceleration of the two segments, we have this velocity graph:
However, physical objects are not infinitely small points, and the vast majority are not perfectly symmetrical around the Z axis. To put it in a simpler term, a moving physical object has the “front” or “face” side:
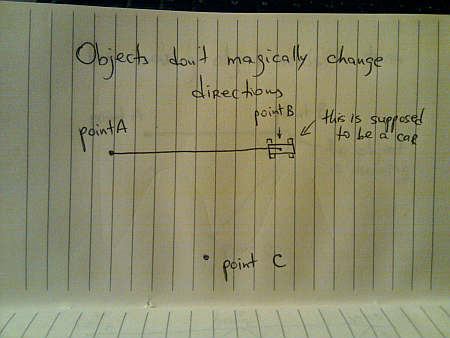
So, when the object starts moving towards C (especially if it is a man made vehicle on regular wheels), it needs to make a turn before it points to C – and can continue moving toward it in a straight line:
Even if you didn’t particularly like physics in high school, you have to deal with centrifugal force on every highway entry and exit – you have to slow down when you take the turn, otherwise your insurance policy is going to be quite expensive. On the related note – this is why outer edge of highway exits (as well as curving railroad tracks) is slightly raised.
How does the velocity graph look around point B?
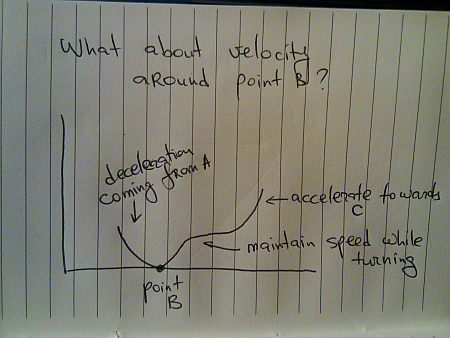
As you start turning, you accelerate until you reach speed which you deem safe to maintain as long as you are turning. Once the turn is done, you start accelerating towards the cruising speed, heading directly towards C.
Depending on what type of driver you are, you can decide to take a smaller curve and drive slower, or drive faster but take a bigger curve:
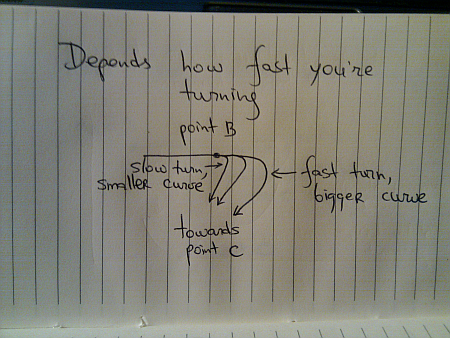
Here you can see how adding the second dimension to the movement path (since C does not lie on the line connecting A and B) adds infinite possibilities to the overall movement trajectory.
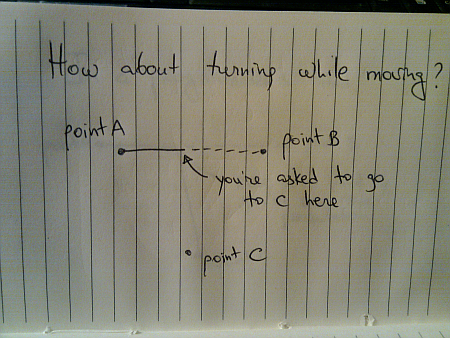
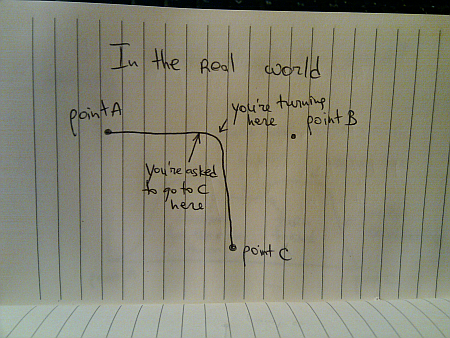
Let’s take this one step further – suppose that you are in between A and B, and are asked to move to C:
If you are on a solid plain (say, a prairie or a dry lake bed), the optimal decision is to make your turn towards C as soon as possible – without arriving at B first. Hopefully by now your solution is not going to look like this:
In the real world, you have two factors that will prevent this from happening. First one was mentioned above – most moving physical objects are not perfectly symmetrical around the Z axis and need to turn around to have their preferred movement direction aligned towards C. The second is due to the momentum, or inertia. If you are moving with non-zero speed towards point B, you cannot immediately switch the direction – just as you cannot immediately go from zero to your cruising speed.
Thus, the movement path is quite similar to the one seen above (when you move to C after arriving at B):
What about the velocity graph?
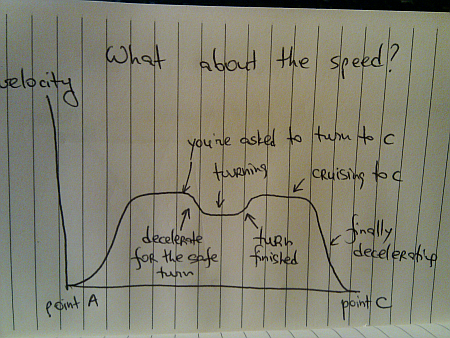
Here, you don’t need to decelerate all the way to zero speed (unless you’re a really bad driver) in order to turn your vehicle and align with C. You decelerate to your preferred turn speed, complete the turn and then accelerate back to your cruising speed (minus all the distractions along the way).
This is just one possible scenario. Here, we have been asked to turn to C while we are driving at our preferred cruising speed. What if you are asked to turn just a few moments after starting from point A – as you are still accelerating?
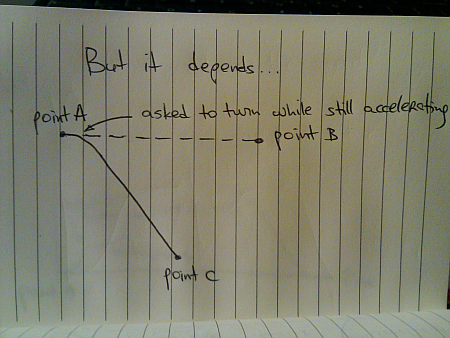
Depending on where exactly you are when this happens (specifically, whether your current speed is lower than your preferred turning speed), the velocity graph may look like this:
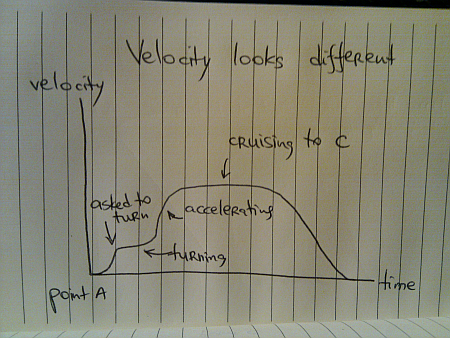
This graph assumes that you are asked to turn when you are moving at exactly your preferred turning speed. If it happens earlier, you will still be accelerating even as you begin the turn. If it happens later, you will drop your speed as you start turning, complete the turn and then accelerate towards C.
Finally, suppose you are asked to turn to C as you are decelerating and getting ready to stop at B:
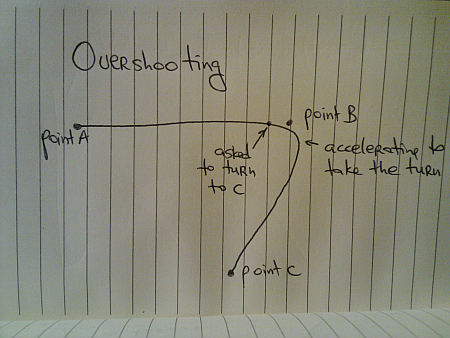
Once again, depending on your current speed you will need to either decelerate or accelerate towards your preferred turning speed, complete the turn and accelerate towards C. Depending on your preferred turning speed you may even overshoot point B as you are completing the turn.
One possible velocity graph for this scenario looks like this:
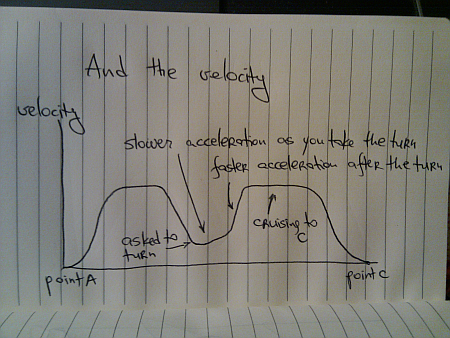
Here, the assumption is that you are asked to turn when your current speed is lower than your preferred turning speed. In this case, you start accelerating as you are turning, and then complete the acceleration after the turn is done.
As before, you see and experience all of these scenarios every day. The next time you get on or off the highway, just notice all the decisions that your body is conveying to the car – and analyze the reasons behind each one of them.
To be continued tomorrow.
